The AICommunityOWL is a private, independent network of AI enthusiasts. It was founded in 2020 by employees of Fraunhofer IOSB-INA, the OWL University of Applied Sciences (TH OWL), the Centrum Industrial IT (CIIT) and Phoenix Contact. Together, we believe in digital progress through the use of machine learning. We want to create sustainable solutions for the challenges of the future: industry, mobility, smart buildings and smart cities – and above all, for people!
The Machine Learning Reading Group (MLRG) of the AICommunityOWL has the goal to get a better understanding of current trends in machine learning on a technical level. The target audience are researchers and practitioners in the field of machine learning. We read and discuss current papers with a high media impact or prominent positioning (at least orals) of the leading conferences, e.g. NeurIPS, ICML, ICLR, AISTATS, UAI, COLT, KDD, AAAI, CVPR, ACL, or IJCAI. Attendees are expected to have read (or skimmed) the papers that are going to be presented so as not to be thrown off by the notation or problem statement and to be able to participate in informed discussions related to the paper. Suggestions for future papers are encouraged, as are volunteer presenters.
We hold our next online meeting on Tuesday, January 11th, at 16:00 under this link.
Don’t miss the date and save the event to your calendar:
Next Session Title:
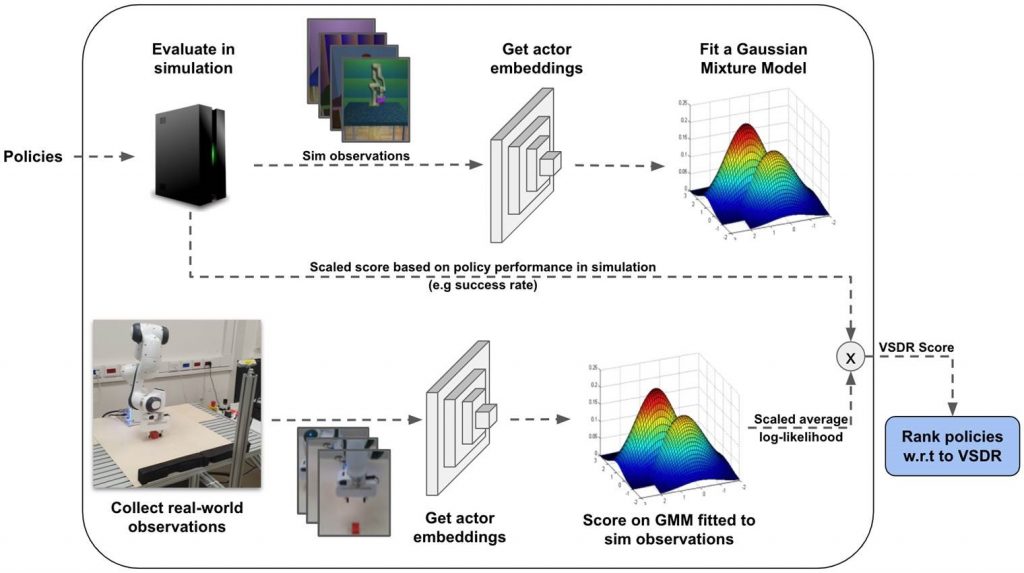
Validate on Sim, Detect on Real — Model Selection for Domain Randomization
https://arxiv.org/abs/2111.00765
Abstract:
Domain randomization (DR) is the popular technique to train the policy on a diverse set of randomly generated domains with the hope of better generalization and closing Sim2Real gap. Due to a large number of hyper-parameters in both the policy learning and DR algorithms, one often ends up with a large number of trained models, here choosing the best model among them demands costly evaluation in the real environment. In this work Authors ask – can we rank the policies without running them in the real world? Out-of-distribution (testing distribution being unknown and different from training) detection techniques can be inaccurate and very sensitive to the particular method used. With the novel Validate on Sim, Detect on Real (VSDR) score, the accuracy of policy ranking is significantly improved without requiring additional real-world data. The effectiveness of VSDR on sim2real transfer is evaluated in a robotic grasping task with image inputs.
Speakers:
Nehal Soni (TH OWL and Fraunhofer IOSB-INA)
For questions or suggestions of topics, feel free to contact markus.lange-hegermann@th-owl.de
Signup to the MLRG Mailing List to never miss another session!


